1. Komponen [kembali]



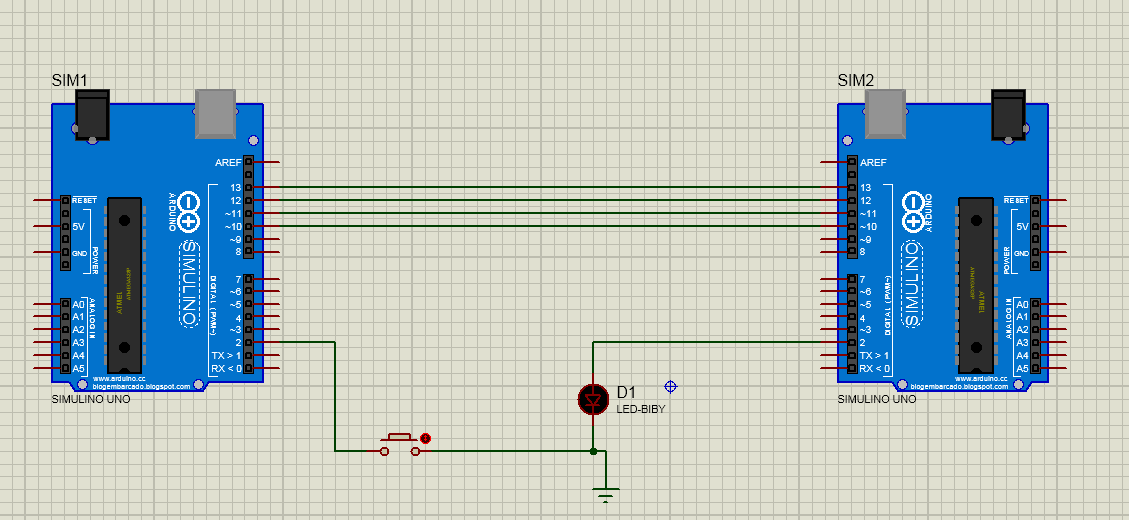


Pada rangkaian ini digunakan komunikasi SPI ( Serial
Peripheral Interface). Komunikasi SPI digunakan pada dua arduino yang
masing-masing berperan sebagai master dan
slave. Komunikasi ini dilakukan dengan menghubungkan mosi dari master dengan mosi dari slave, miso dari
slave dengan miso dari master, sclk dari master dengan sclk dari slave, dan ss dari slave dengan ss master. Push
button berfungsi sebagai
input pullup dari master, artinya apabila
push button ditekan maka akan berlogika low (0) dan apabila diangkat maka akan berlogika high (1).
Saat master mengirimkan logika
low ke slave maka LED akan hidup dan mati secara bergantian dengan jeda 1000 ms atau 1 s. Sedangkan saat master mengirimkan logika high ke slave
maka LED akan mati.
1. Apakah kita dapat menggunakan lebih dari 1 master?
Jelaskan alasannya!
Jawab:
Untuk
SPI, hanya dapat menggunakan 1 master
saja. Hal ini dikarenakan
Master pada SPI sebagai pengontrol komunikasi serial
sinkron pada
SPI dimana dapat mengirim atau menerima data. Namun,
SPI ini dapat memiliki lebih dari 1 Slave dimana terdapat Slave Select
(SS) untuk memilih
(mengontrol) Slave mana yang dipilih oleh Master.
2. Apakah port MISO harus digunakan? Jelaskan alasannya!
Jawab:
Tidak ada komentar:
Posting Komentar