1. Komponen [kembali]




1. Bagaimana pengaruh potensiometer terhadap kecepatan
motor?
Jawab:
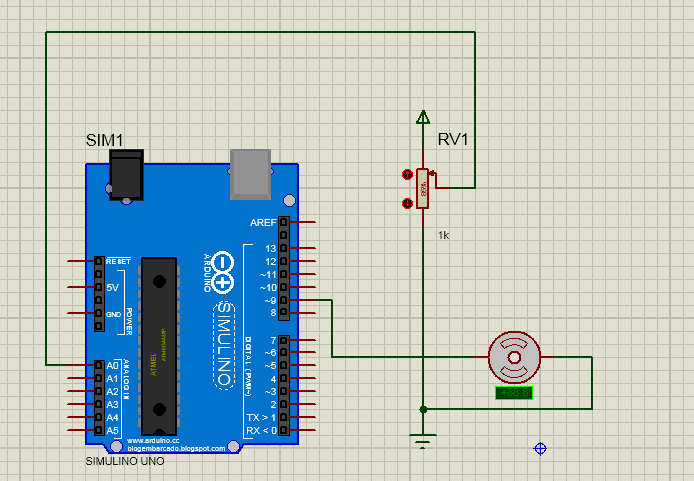
Potensiometer disini menyebabkan terjadinya perubahan kecepatan pada motor DC. Potensiometer merupakan sebuah resistor variabel yang nilai resistansinya dapat di atur dengan cara memutar tuasnya. Pada rangkaian ini potensiometer berpengaruh terhadap kecepatan motor. Semakin besar nilai potensiometer maka semakin besar nilai resistansinya sehingga kecepatan motor akan menjadi lebih cepat, sebaliknya semakin kecil nilai potensiometer maka semakin kecil nilai resistansinya sehingga kecepatan motor menjadi lebih lambat. Atau saat potensiometer diturunkan ke arah mendekati groun makan kecepatan motor akan berkurang dan begitupun sebaliknya.
2. Bagaimana cara menghubungkan kaki kaki potensiometer?
Jawab:
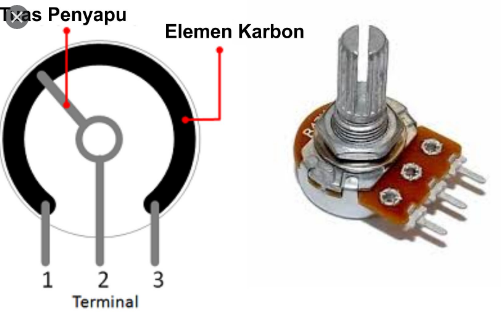
Potensiometer memiliki 3 kaki, yaitu kaki yang akan dihubungkan ke vcc, ground, dan outputnya. Kaki 1 atau 3 bisa dihubungkan ke vcc atau ke ground salah satunya. Apabila kaki 1 dihubungkan ke vcc, maka kaki 3 dihubungkan ke ground, sebaliknya apabila kaki 3 dihubungkan ke ground, maka kaki 1 dihubungkan ke vcc. Selanjutnya kaki 2 dihubungkan ke yang akan menerima output berupa nilai resistansi dari potensiometer. Nilai resistansi pada potensiometer ini akan semakin besar ketika diputar/digeser kearah kaki yang dihubungkan ke ground dan akansemakin kecil ketika diputar/digeser kearah kaki yang dihubungkan ke vcc.